算法简介
决策树算法是一种自上而下的,对样本进行树形分类的算法。是一种有监督的算法
包括特征选择、决策树的生成、决策树的剪枝三个步骤。
几个概念
信息熵
熵在物理学中的定义为:混乱程度,在数学中的定义为:随机变量的不确定性,即熵是随机变量的不确定性的度量。
假设X是取有限个值的随机变量
概率分布:
随机变量X的熵定义为(log以2为底):

从上面的公式我们可知,熵的值与X的取值无关,只与X的分布和概率有关,因此通常我们写成H(p),而不是H(X):

下面举个例子:

那么熵为:

熵——关于不确定性的理解:熵越大:随机变量的不确定性就越大。
假设随机变量X只有两个取值0和1,那么X的分布:

熵的值为:

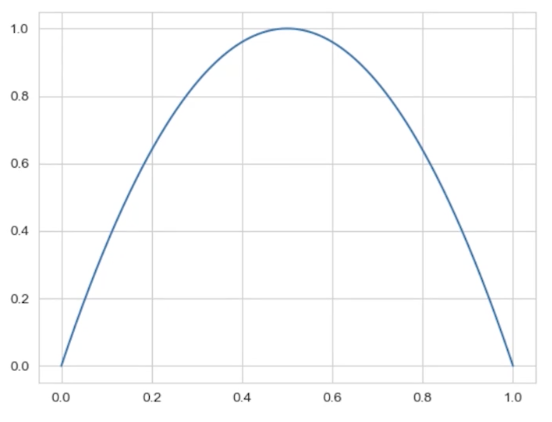
横坐标为p,纵坐标为H( p)。我们来看三个特殊情况:
当P=0时,H(P)=0,即X的取值一定为1,P(X=0)=1-P=1,此时X的取值是完全确定的,不确定性为0;
当P=1时,H(P)=0,即X的取值一定为0,P(X=0)=P=1,此时X的取值是完全确定的,不确定性为0;
当P=0.5时,H(P)=1,即X的取值为1的概率是50%,取值为0的概率为50%。此时不确定性是最高的。
条件熵
概率: 条件概率:
条件概率:
含义:当事件X发生的情况下,事件Y发生的概率
熵: 条件熵:
条件熵:
含义:已知随机变量X的情况下,随机变量Y的不确定性
条件熵的计算公式
条件熵: ,
,
信息增益
熵与条件熵的差值
符号: ,特征A对数据集D的信息增益。其中,g: Gain D:数据集Dataset A:特征Attribute
,特征A对数据集D的信息增益。其中,g: Gain D:数据集Dataset A:特征Attribute
计算公式:
通俗来讲,当我们知道信息A以后,信息的不确定性发生了变化,变成了H(D)-H(D|A),如果这个值很大,说明A告诉了我们一些非常有用的信息,数据集变成了一个更加确定的数据集。反过来,如果A带来的信息量很小,即H(D|A)与H(D)的值相近,g(D,A)近似于0,说明A没有给我们带来有用的信息。
决策树算法
这里我们主要讨论决策树中较为经典的ID3算法,它是由罗斯昆(J. Ross Quinlan)于1975年在悉尼大学提出,算法的核心为——信息熵。
ID3算法原理
1.计算数据集D的熵 
2.计算某个特征A对于数据集D的条件熵 
3.计算信息增益,选取信息增益最大的特征作为节点 
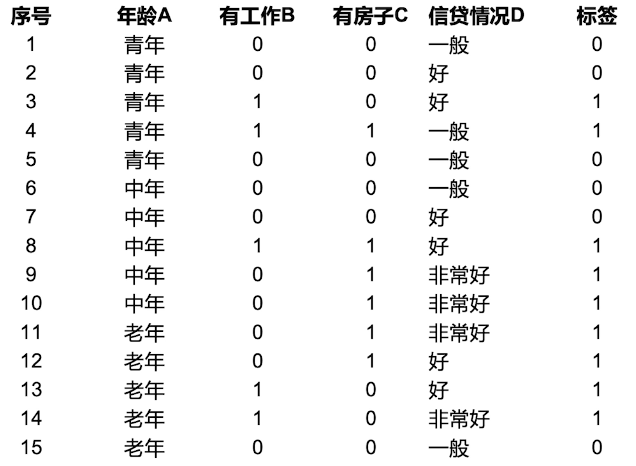
举个例子,其中标签代表银行是否贷款给该用户。
主要步骤如下:
1.计算信息熵

2.计算条件熵
A的取值只有三个:青年、中年和老年,因此对应的概率分别为5/15、5/15、5/15。

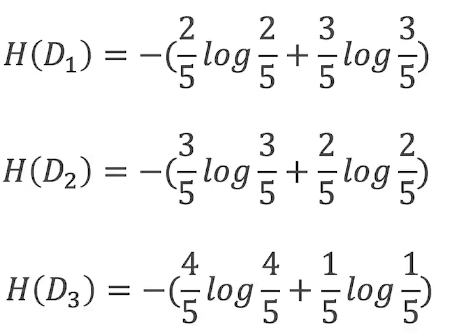
其中,H(D1)、H(D2)和H(D3)的概率如下。以D1为例,我们看年龄A=’’青年’’的5个样本中,标签为0的有3个,标签为1的有2个,因此H(D1)的计算如下:
3.计算信息增益

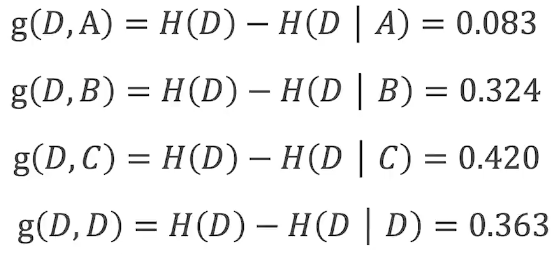
4.计算所有特征的信息增益
找出信息增益最大的特征作为划分特征,其中特征C的信息增益最大,因此选定特征C作为节点。
ID3算法的缺点
1.只能处理离散型变量,无法处理连续型变量
2.对于样本缺失值比较敏感(若对于连续型数据,可以通过缺失值前后的数据进行处理补全缺失值,但对于离散型数据无法补)
3.无剪枝策略,易产生过拟合问题
4.每次分裂倾向于取值较多的特征(由信息熵不确定性定义决定),导致最终泛化性能较差(训练集表现较好,但在测试集上表现较差)
C4.5
为了避免ID3算法中对取值数目较多的特征有所偏好这一缺点,著名的C4.5算法不直接使用信息增益,而是使用“增益率”(gain ratio)来选择最优划分属性。
增益率的计算公式如下。需要注意的是,在计算信息增益率之前仍需要计算”信息增益”,因此ID3中计算信息增益的过程仍然有效。

其中, 为特征 A 的固有值。
这里需要注意,信息增益率对可取值较少的特征有所偏好(分母越小,整体越大),因此 C4.5 并不是直接用增益率最大的特征进行划分,而是使用一个启发式方法:先从候选划分特征中找到信息增益高于平均值的特征,再从中选择增益率最高的。
从定义中不难看出,样本数量越少分母越大,相除后的信息增益率也就越小,因此做到了一定的平衡,ID3算法中对取值数目较多的特征有所偏好的问题也得到一定程度的解决,但C4.5依然不能处理连续型特征数据。
CART
熵模型拥有大量耗时的对数运算,因此CART模型中引入了基尼(Gini)指数。在简化模型的同时还保留了熵模型的优点。基尼指数代表了模型的不纯度,基尼系数越小,不纯度越低,特征越好。这和信息增益(率)正好相反。

其中 k 代表类别。基尼指数反映了从数据集中随机抽取两个样本,其类别标记不一致的概率。因此基尼指数越小,则数据集纯度越高。基尼指数偏向于特征值较多的特征,类似信息增益。基尼指数可以用来度量任何不均匀分布,是介于 0~1 之间的数,0 是完全相等,1 是完全不相等。此外,当 CART 为二分类,其表达式为:

算法优化-剪枝处理
为什么要剪枝呢?目的是提高决策树的泛化能力,过拟合的树在泛化能力的表现非常差。常见的剪枝方法有预剪枝和后剪枝。
预剪枝
核心思想:在树中节点进行分裂之前,先计算当前划分能否带来模型泛化能力的提升
三种情况:
a.当树到达一定深度的时候,停止树的生长
b.当到达当前节点的样本数量小于某个阈值的时候,停止生长
c.计算每次分裂时对测试集准确率的提升,小于某个阈值,停止生长
后剪枝
核心思想:首先生长完全生长的决策树,然后自底向上进行剪枝
原则:判断在测试集上的准确率,若剪枝后的准确率没有多少下降,那么该划分是不必要的
算法代码
以下代码实现了决策树的 ID3算法,找到最优分裂节点
1 | from numpy import * |